Control
During flight we use feedback control to keep the rocket upright with minimal lateral velocity. The rocket specifically employs a linear quadratic regulator to manipulate the thrust vector, which controls the rocket's attitude and position.

|

|
Basic Facts
Design Decisions
|
Design Process
ResultsIn 2021, we started to conduct stability tests for the rocket. In these tests, the rocket is fixed to a stand, but allowed to rotate in two axis. After setting at a certain orientation, we measure how will it corrects to it nominal, upright position.
|
Navigation
In order to effectively control the rocket, we need it to measure its attitude, velocity, and position. We use a variety of sensors and an extended Kalman filter for state estimation.

Basic Facts
|

Design Process
|
Design Decisions
- (Extended) Kalman Filter - our previous navigation system, which relied solely on IMU measurements, was unable to produce accurate velocity estimates. This led us to pursue a Kalman Filter and specifically an EKF to account for the non-linear dynamics.
- Initial angle determination - we use the accelerometer, sensing the gravity vector, and the magnetometer to measure the initial attitude of the rocket.
- Computer vision over GPS - we decided to use computer vision over GPS because of GPS precision and the small scale of our trajectory.
Simulation
We have built a dynamic simulation of our rocket system, which allows us to test and evaluate our navigation and control algorithms virtually.

Design Details
|
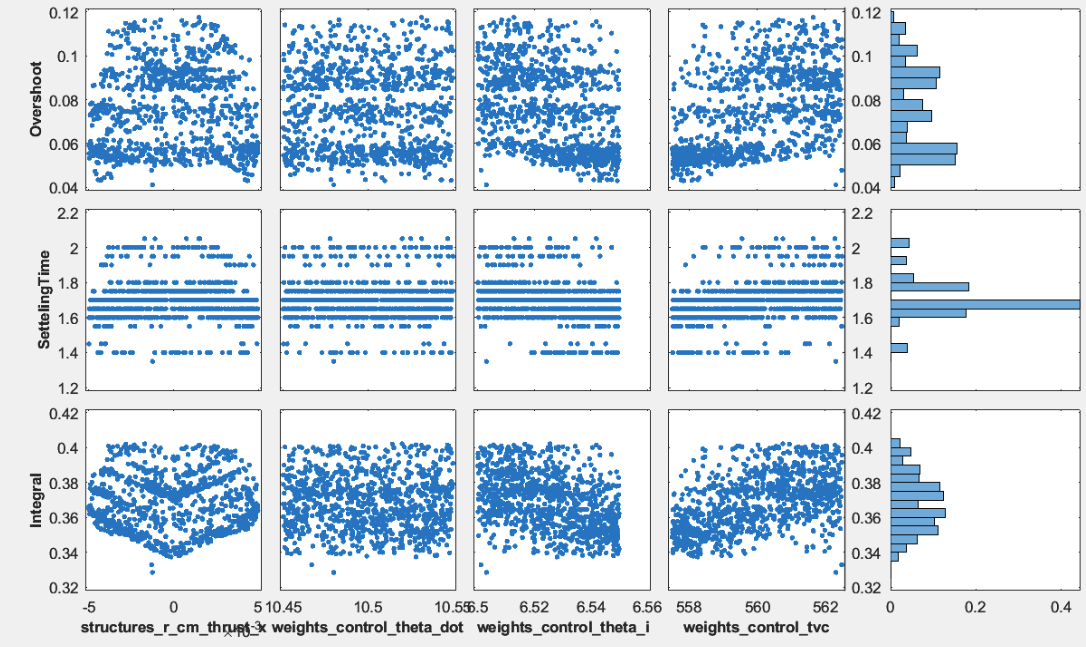
The results of a Monte Carlo simulation, displaying the settling time and overshoot under varying controller weights and mass alignment errors.
Design Process
|
